Computational Physics Toolkit
From local rigid bodies to many-body gravity.
This project started as a rigid-body simulation sandbox for numerical integration, collisions, and interaction feel.
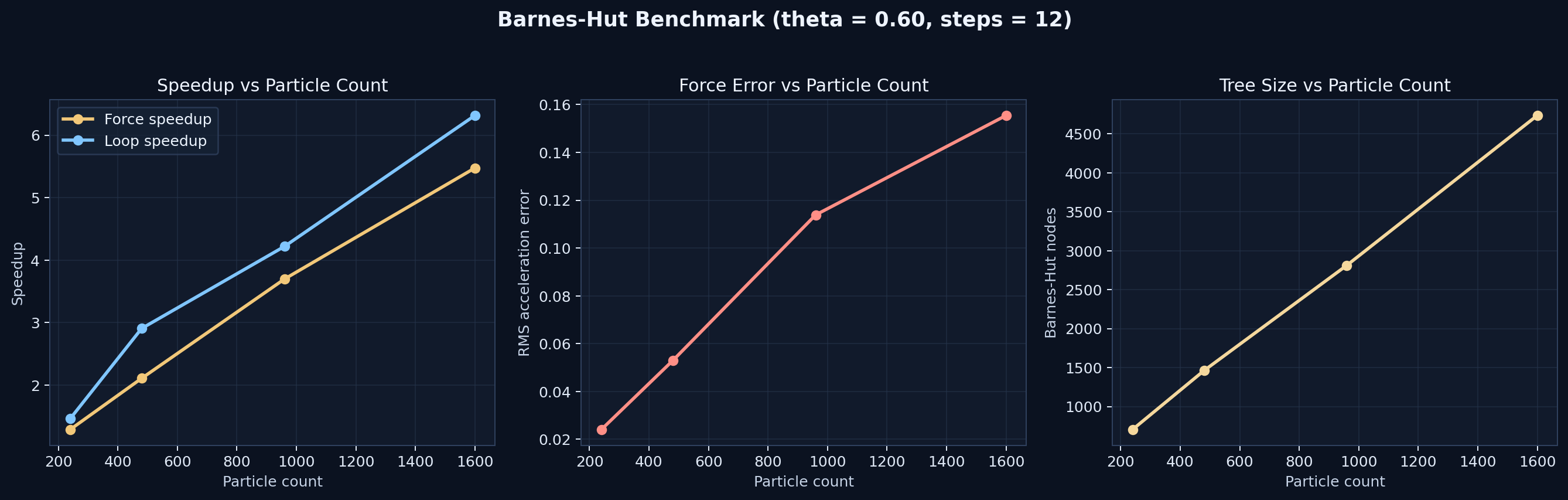
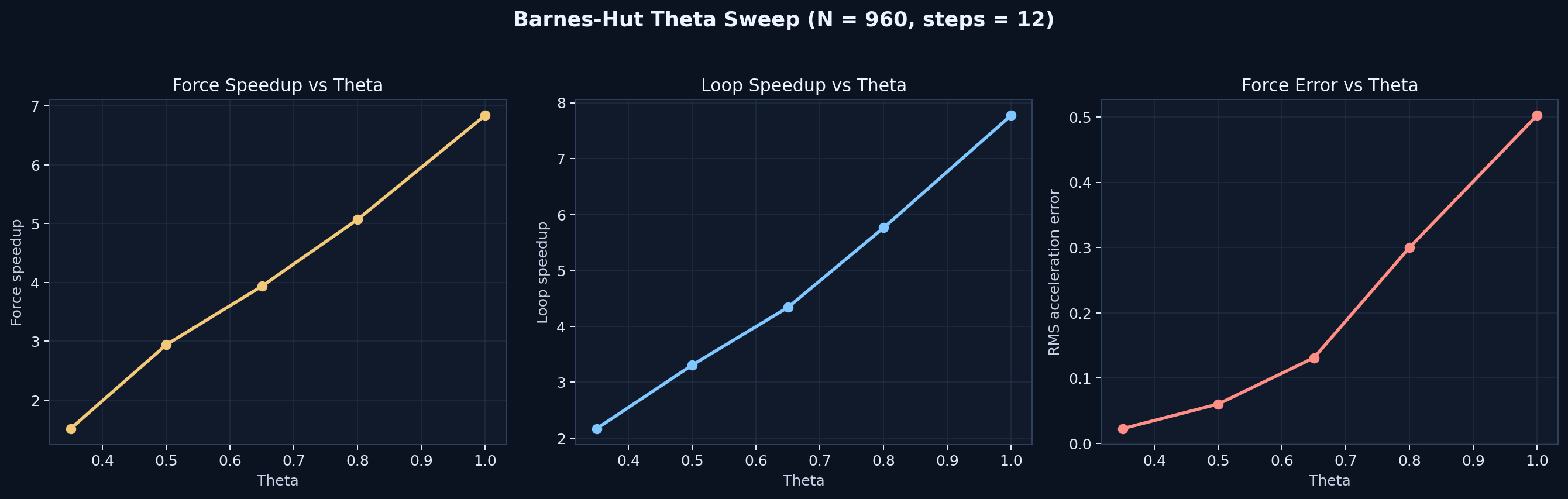
It now includes a deeper Barnes-Hut track: scaling from pairwise O(N²) gravity toward tree-based O(N log N) approximation,
a split-view exact-vs-tree compare lab, generated scaling figures, and new theta sweeps that make the speed-versus-error tradeoff concrete.